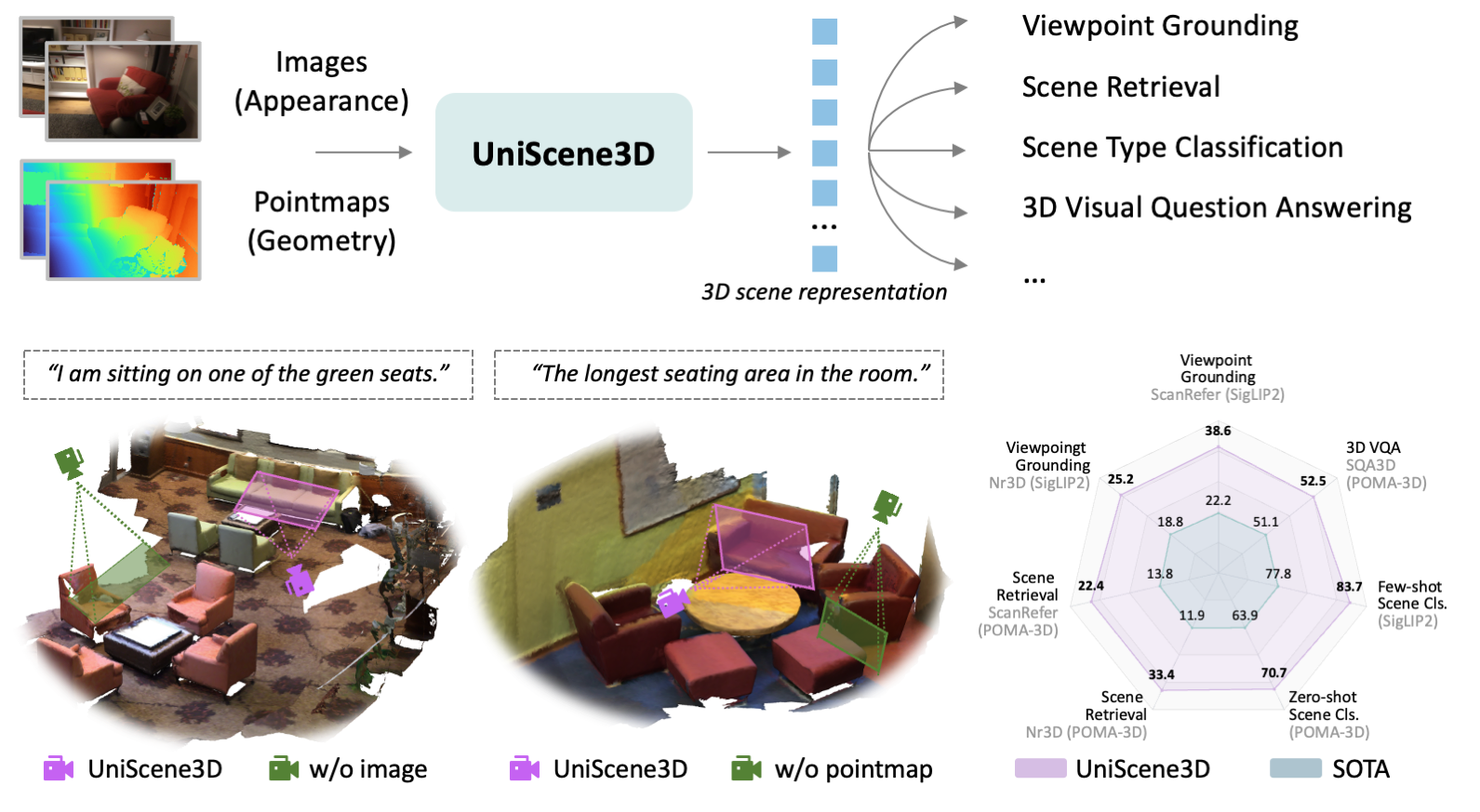
Contrastive Language-Colored Pointmap Pretraining for Unified 3D Scene Understanding
Ye Mao, Weixun Luo, Ranran Huang, Junpeng Jing, Krystian Mikolajczyk
PhD candidate at Imperial College London working on 3D scene understanding, spatial intelligence, and multimodal large language models.
Building generalizable 3D perception systems that bridge geometry, semantics, and open-world reasoning across real-world environments.
I am a PhD candidate in Computer Vision and Machine Learning at MatchLab, Imperial College London, supervised by Prof. Krystian Mikolajczyk and supported by the Imperial President's Scholarship . My research focuses on developing generalizable spatial intelligence models that can represent and reason about real-world indoor environments, while transferring effectively across a wide range of 3D tasks.
Before starting my PhD, I completed an MPhil in Medical Sciences at the University of Cambridge and an MSc in Applied Machine Learning at Imperial College London. I previously studied Computer Science and Robotics at King's College London.
Ye Mao, Weixun Luo, Ranran Huang, Junpeng Jing, Krystian Mikolajczyk
Ranran Huang, Weixun Luo, Ye Mao, and Krystian Mikolajczyk

Junpeng Jing, Weixun Luo, Ye Mao, and Krystian Mikolajczyk
Ye Mao, Weixun Luo, Ranran Huang, Junpeng Jing, and Krystian Mikolajczyk
Louis Kreitmann, Ye Mao, Ke Xu, Alison Holmes, Karen Brengel-Pesce, Laurent Drazek, and Jesus Rodriguez-Manzano
Junpeng Jing, Weixun Luo, Ye Mao, and Krystian Mikolajczyk
Ye Mao, Weixun Luo, Junpeng Jing, Anlan Qiu, and Krystian Mikolajczyk
Ye Mao, Junpeng Jing, and Krystian Mikolajczyk
Junpeng Jing, Ye Mao, and Krystian Mikolajczyk
Ye Mao, Lan Jiang, Xi Chen, and Chao Li
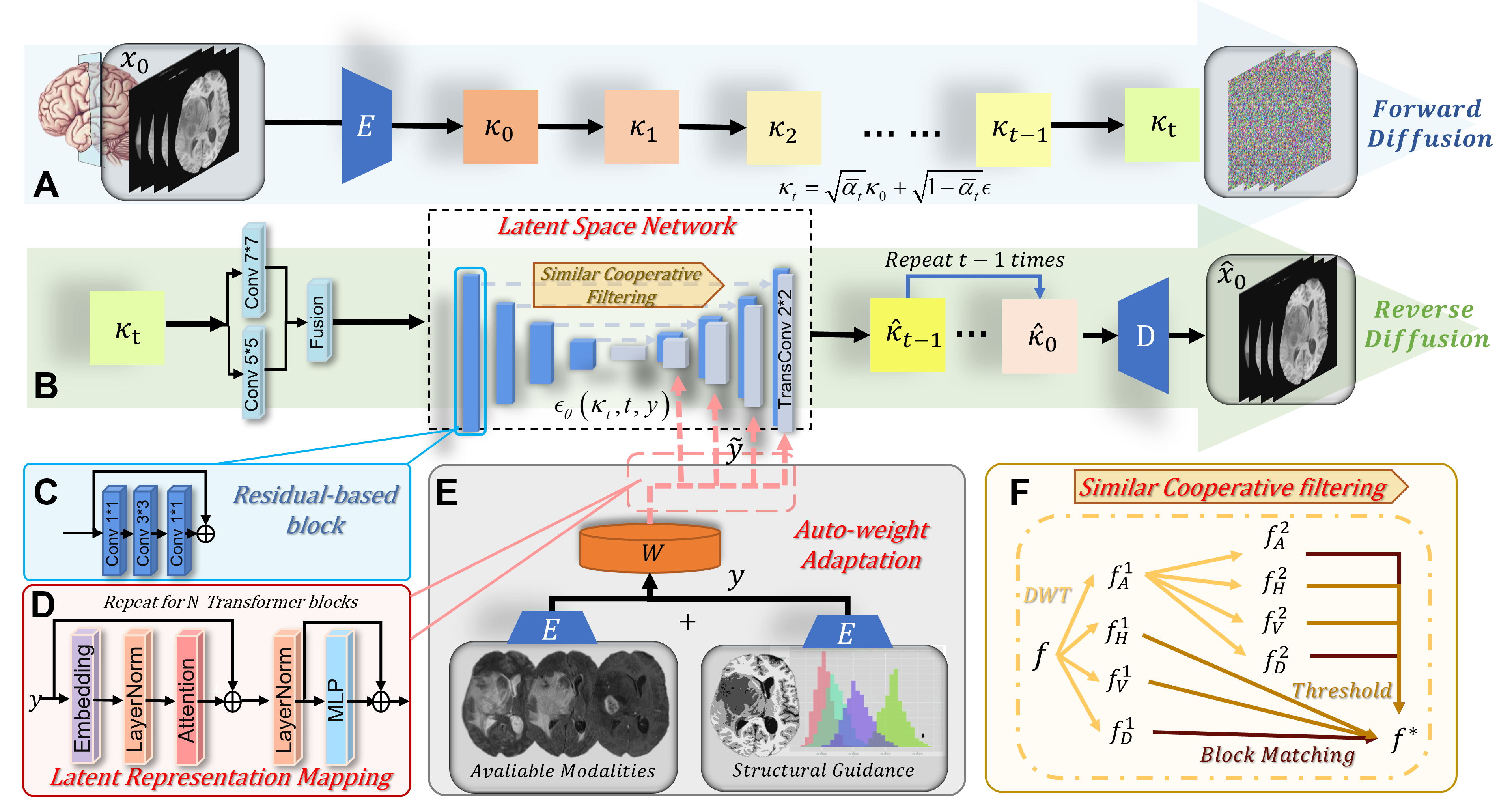
Lan Jiang, Ye Mao, Xi Chen, and Chao Li
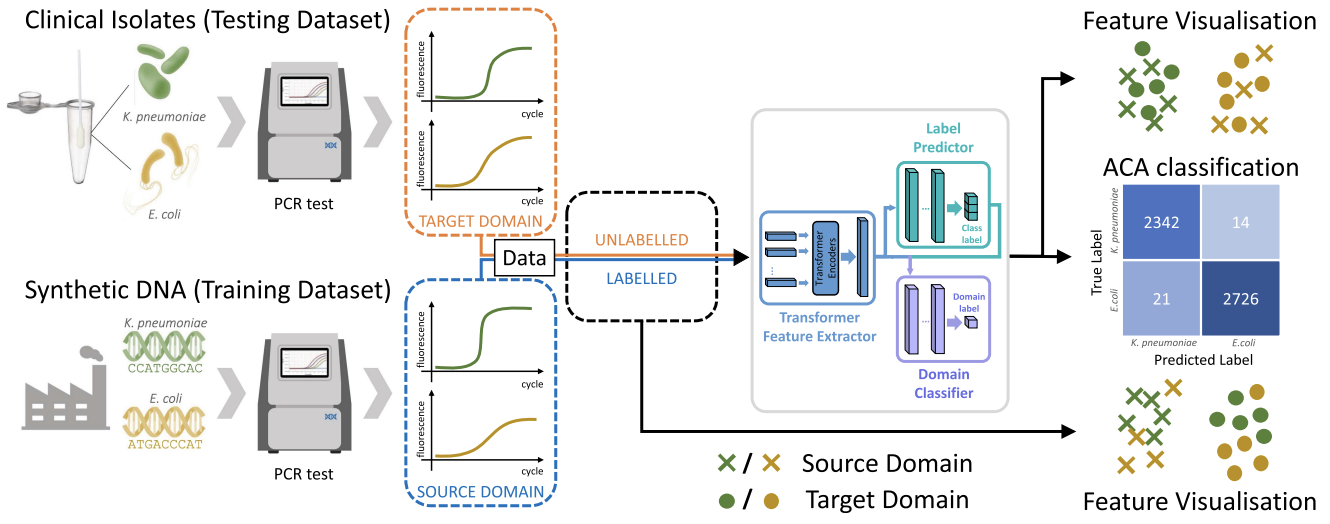
Ye Mao, Ke Xu, Luca Miglietta, Louis Kreitmann, Nicolas Moser, Pantelis Georgiou, Alison Holmes, and Jesus Rodriguez-Manzano